
ROBOTICS LAB
Robotics Algorithm and Computable Systems (RACS) Laboratory focuses on the development of intelligent systems, motion planning in complex spaces, heterogeneity analysis of the workspace, metabolic pathways, and protein folding. We have successfully worked on sampling-based motion planning algorithms, performance modeling and application of multi-robots in real-time scenarios, and computational biology. We are always on a lookout for dedicated Masters and Ph.D. students who are passionate about a breakthrough in Robotics.
Publications
- 2019
Sourav Dutta, Dan Hug and Chinwe Ekenna
"Uncertainty Measured Markov Decision Process" Technical Report, University at Albany, SUNY (2019) - 2019
Sourav Dutta, Chinwe Ekenna,
"Air-to-Ground Surveillance Using Predictive Pursuit" 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada, May 2019 - 2019
Upadhyay, Aakriti, Chinwe Ekenna, Weifu Wang,
"Approximating C_free space topology by constructing Vietoris-Rips complex." IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, Macau China (To appear) - 2019
Tuan Tran, Jory Denny, Chinwe Ekenna,
"Predicting Collision Detection with a Two-Layer Neural Network" Technical report, University at Albany, SUNY (2019) - 2018
C Ekenna, L Tapia
"The Integration of Diversity with Robotics Start-Ups [Women in Engineering]" IEEE Robotics & Automation Magazine 25 (4), 100-104 - 2018
A Upadhyay, C Ekenna
"Investigating heterogeneous planning spaces" 2018 IEEE International Conference on Simulation, Modeling, and Programming - 2017
T Tran, C Ekenna,
"Metabolic pathway and graph identification of new potential drug targets for Plasmodium Falciparum," Bioinformatics and Biomedicine (BIBM), Nov 2017 and participated in 2017 IEEE International Conference, USA - 2016
Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato,
"Impact of Approximate Methods on Local Learning in Motion Planning" , Proceedings of the 1st International Workshop on Robot Learning and Planning (RLP 2016) in conjunction with 2016 Robotics: Science and Systems June, 2016 – Ann Arbor, Michigan, USA - 2015
Chinwe Ekenna, Shawna Thomas, Nancy Amato,
"Adaptive Local Learning in Sampling Based Motion Planning for Protein Folding," Bio Med Central Systems Biology, 10(2):165--179, Aug 2016. Also, In The IEEE International Conference on Bioinformatics and Biomedicine (BIBM), pp. 61-68, Washington DC, USA, Nov 2015 - 2015
Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato,
Studying learning techniques in different phases of PRM construction," In Machine Learning in Planning and Control of Robot Motion Workshop (IROS-MLPC), Hamburg, Germany, 2015 - 2015
Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato,
"Improved Roadmap Connection via Local Learning for Sampling Based Planners," In Proc. IEEE Int. Conf. Intel. Rob. Syst. (IROS), pp. 3227-3234, Hamburg, Germany, Oct 2015 - 2014
Chinwe Ekenna, Shawna Thomas, Nancy Amato,
Adaptive Neighbor Connection Aids Protein Motion Modeling," In Proc. RSS Workshop on Robotics Methods for Structural and Dynamic Modeling of Molecular Systems, Jul 2014 - 2014
Chinwe Ekenna, Shawna Thomas, Nancy Amato,
Adaptive Neighbor Connection using Node Characterization," Technical Report, TR14-005, Apr 2014. Also, Technical Report, TR14-005, Apr 2014 - 2013
Chinwe Ekenna, Sam Ade Jacobs, Shawna Thomas, Nancy M. Amato,
Adaptive Neighbor Connection for PRMs: A Natural Fit for Heterogeneous Environments and Parallelism," In Proc. IEEE Int. Conf. Intel. Rob. Syst. (IROS), Tokyo, Japan, Nov 2013 - 2013
Shawna Thomas, Lydia Tapia, Chinwe Ekenna, Hsin-Yi (Cindy) Yeh, Nancy M. Amato,
Rigidity Analysis for Protein Motion and Folding Core Identification," In Proc. of 2013 AAAI Wkshp. on Art. Int. and Robot. Meth. in Comp. Bio., Bellevue, WA, Jul 2013 - 2012
Shuvra Nath, Shawna Thomas, Chinwe Ekenna, Nancy M. Amato,
A Multi-Directional Rapidly Exploring Random Graph (mRRG) for Protein Folding," In ACM Conference on Bioinformatics, Computational Biology and Biomedicine, pp. 44-51, Orlando, FL, USA, Oct 2012
Projects
We work on futuristic projects that we firmly believe can change the face of tomorrow's technology.
Abstract
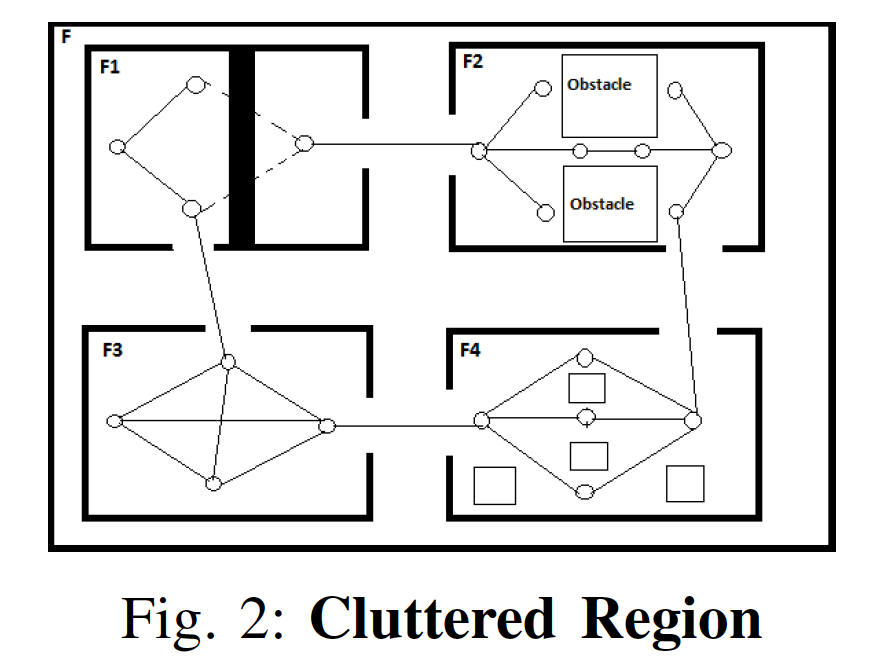
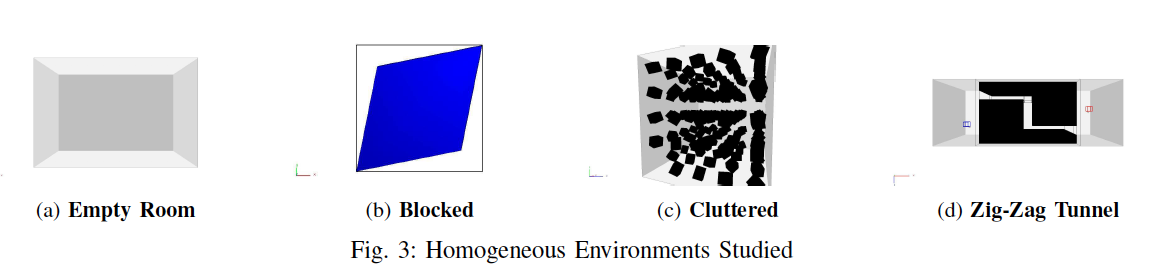
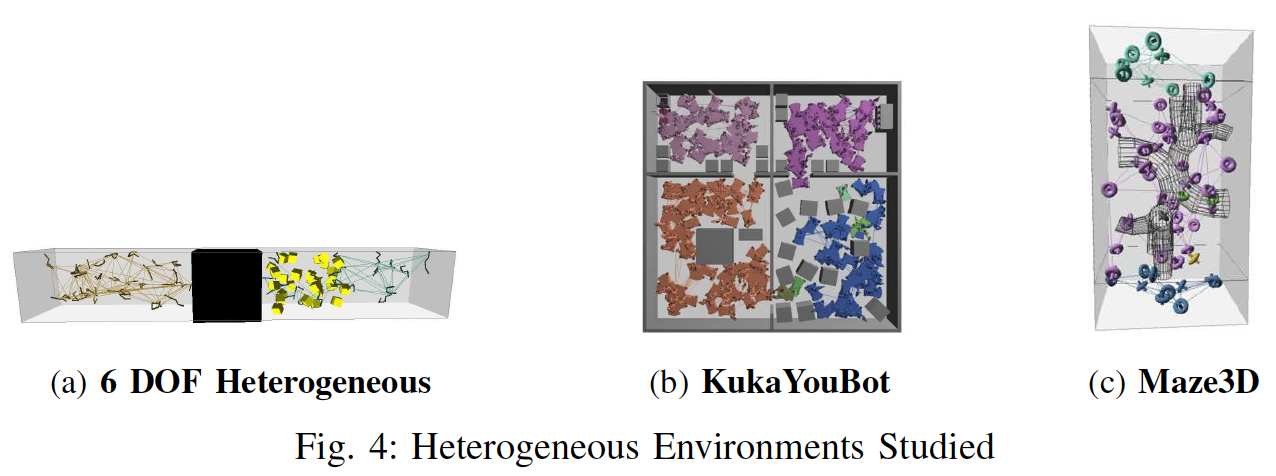
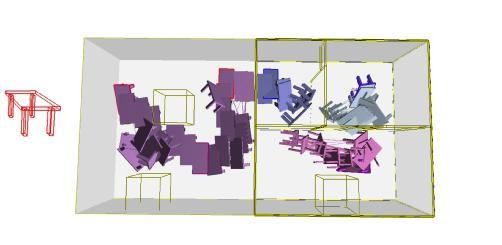
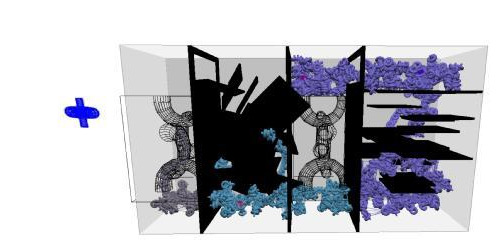
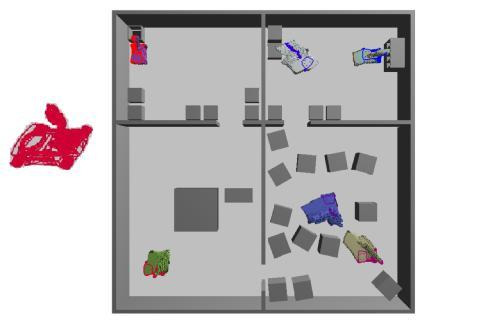
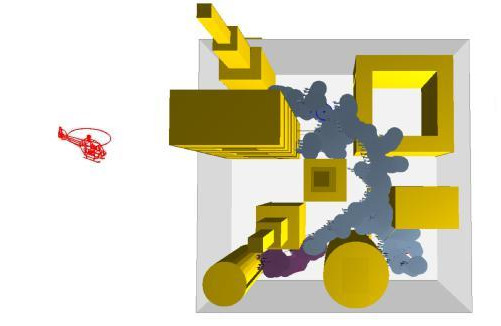
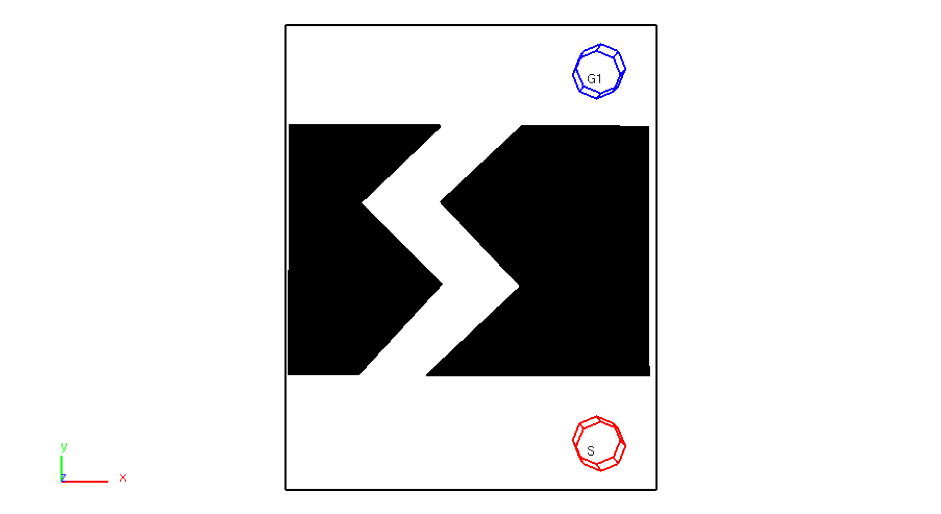
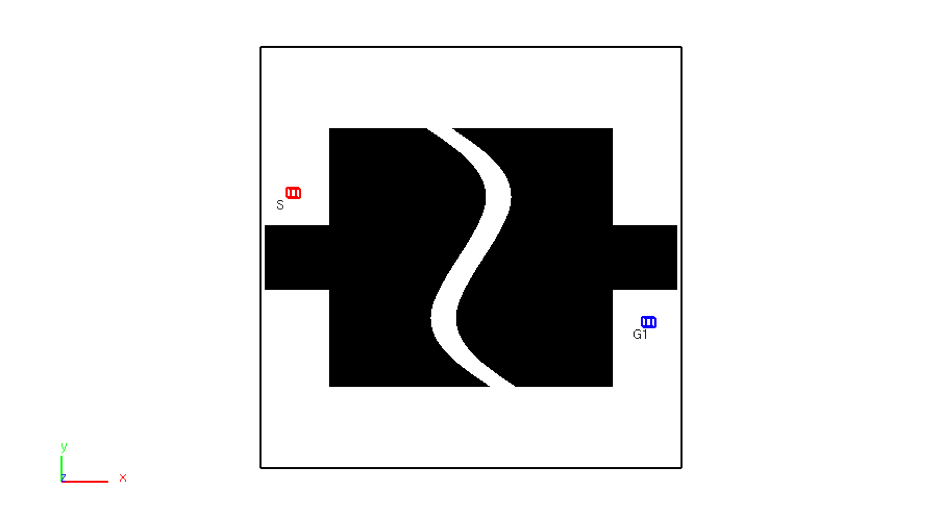
Motion planing algorithms looked into the different states, regions and features of the environments for these robots developed overtime with a specific interest e.g., narrow passage, homotopy classes, but not necessarily considering the heterogeneity. This work brings the vision into implementation of algorithm that identifies the homogeneous regions of the workspace, i.e. free region, blocked region, narrow passage and cluttered region, using the properties of visibility, expansiveness and homotopy classes and intelligently applies best sampling method to traverse through the environments. It uses reinforcement learning methodology to learn about the workspace and the sampler to use from given set of samplers in an identified homogeneous region of the workshop. The algorithm is an extension of HybridPRM in heterogeneous planning spaces and works well for any robot dimensions. It showed a promising results compared to other algorithms in terms of time needed to solve query, number of nodes generated and connected components formed.
Challenges
It was challenging to understand the properties of configuration space and apply them to achieve the goal.
Future Work
Requires enhancement to apply on robots for application in life-saving and real-time environments.
Paper 1: Technical report for Approximating Cfree space topology by constructing Vietoris-Rips complex
Abstract
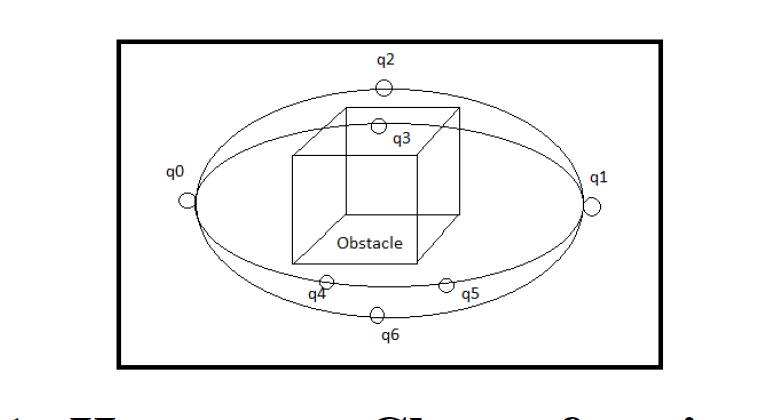
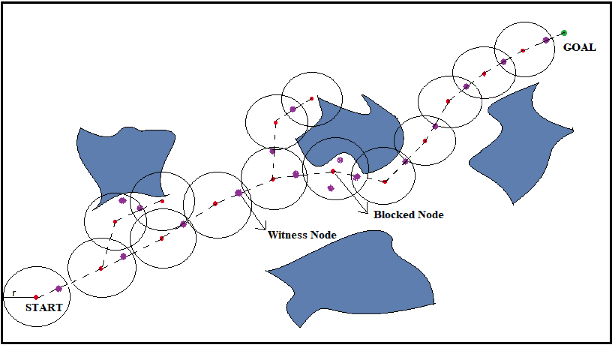
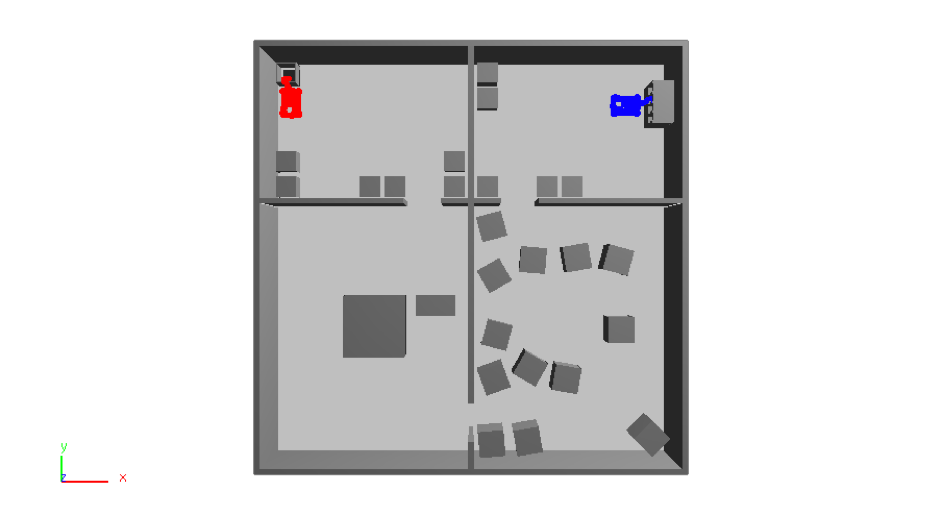
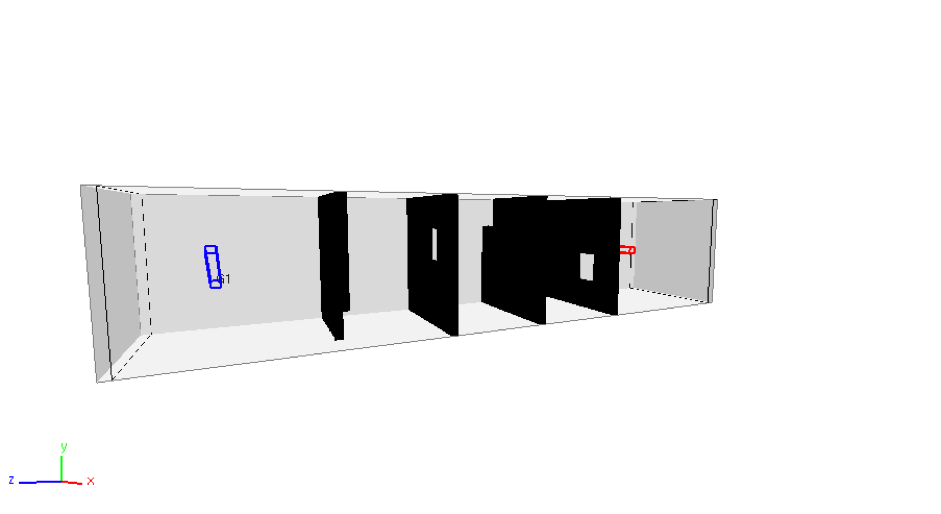
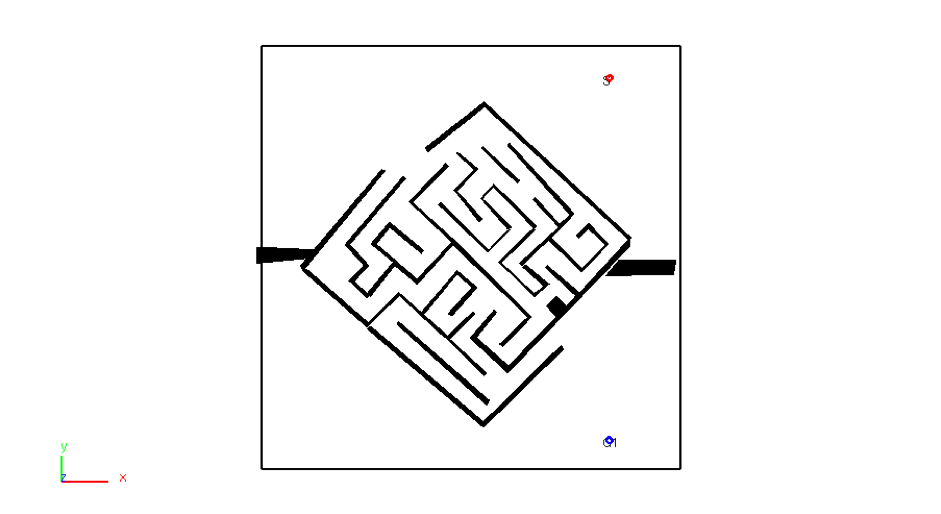
Motion planning for robots have generally worked with a single start and goal solution but in real world problems, multi-goal positions is most often the case. This work proposes a Rapidly Exploring Random Search Explorer (RESE) algorithm, that works for multi goal scenarios by generating witness/mediating nodes to find feasible connections within a radial distance from a configuration in the graph. It includes a Q-learning technique to help track and learn witness nodes of successful trajectories while attempting connections in narrow regions by considering multiple directions. This results in better and realistic performance of robots in scenario where multi goal positions is crucial and of the essence.
Challenges
Improvements in RRT algorithm to work in multi-goal environments.
Future Work
Enhancing the applicability of RESE to work on real robots.
Paper 1: Technical report for Rapidly Exploring Random Search Explorer
Abstract
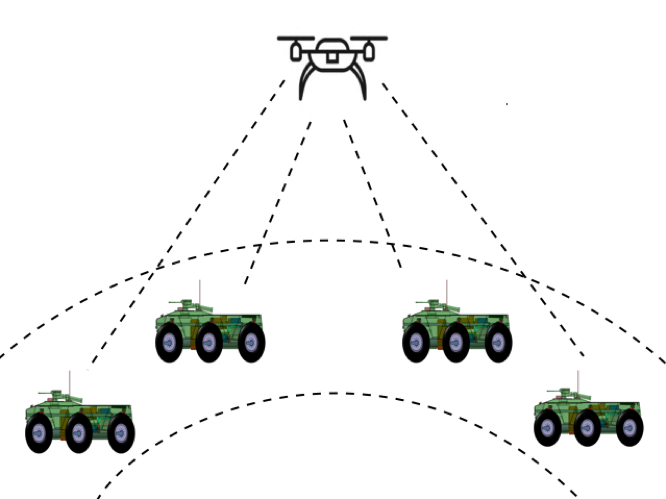
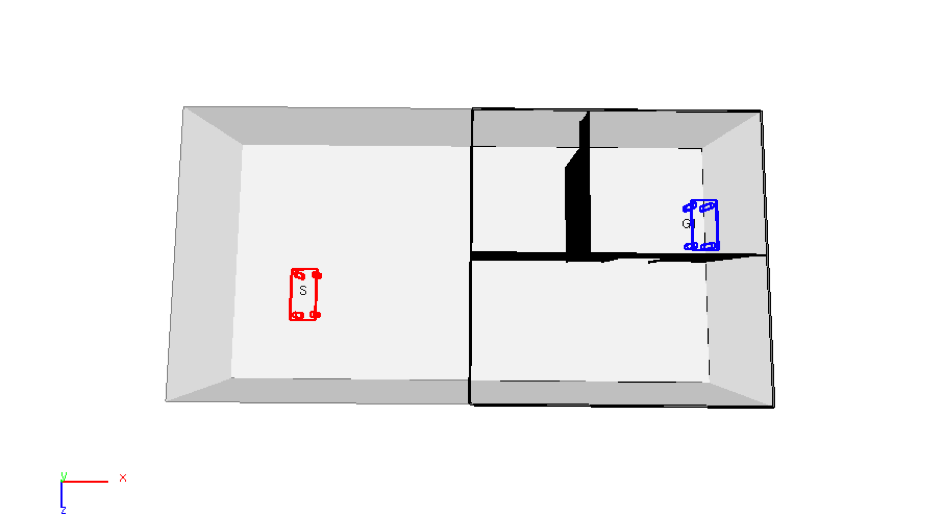
This paper introduces a probabilistic prediction model based on Markov decision process to improve tracking time and location detection accuracy in an air-to-ground robot surveillance scenario. While most surveillance algorithms focus mainly on controls of an unmanned aerial vehicle (UAV) and camera for faster tracking of an unmanned ground vehicle (UGV), this paper proposes a way of minimizing detection and tracking time by applying a prediction model to the already observed path taken by the UGV. A novel tracking algorithm has been designed that applies Markov prediction model on the trajectories of an UGV derived from some unknown path planning algorithm, to predict chosen motion planning algorithm used by the UGV that runs a reinforcement learning model in a simulated setting. Most of the existing surveillance algorithms require partitioning of the environment into grids and maximizing probability of existence of the target in one single grid by using sensor data. This partitioning is not scalable if the environment is of a larger size. We present a pursuit algorithm that addresses the problem of target localization by combining prediction of used planning algorithm by the target, and application of the same planning algorithm used by the target to predict its future trajectories. Our results show a high predictive accuracy based on a final position attained by the UGV and the location predicted by our model.
Future Work
Extending this algorithm to be applied to a team of pursuers and a team of invaders. Further, this algorithm can be applied on a cooperative team of robots to determine their relative positions in the environment and also for collision detection in a dynamic environment.
Paper 1: Technical report for Air-to-Ground Surveillance using Predictive Pursuit
Abstract
The malaria parasite Plasmodium Falciparum varies its genes expression profile depending on its developmental stage and its host. The parasite employs various regulatory mechanisms to complete their life cycle and survive in both mosquito and human hosts During the life cycle of the paraste, each gene can have different levels of gene expression. Within a certain expression threshold, a gene could be considered on (doing transcription) or off. In this paper we propose a novel deep learning model for predicting whether a specific gene has any effect (transcript) during the parasite's life cycle in mosquito. Particularly, we develop a neural network to classify the set of features extracted from the experimental results for each genes. The feature sets is based on the enrichment level in post-intranslational modifications of histones and gene expression level of multiple genes during the parasite's life cycle.
#5 Metabolic Pathway and Graph Identification of New Potential Drug Targets for Plasmodium Falciparum. (Completed)
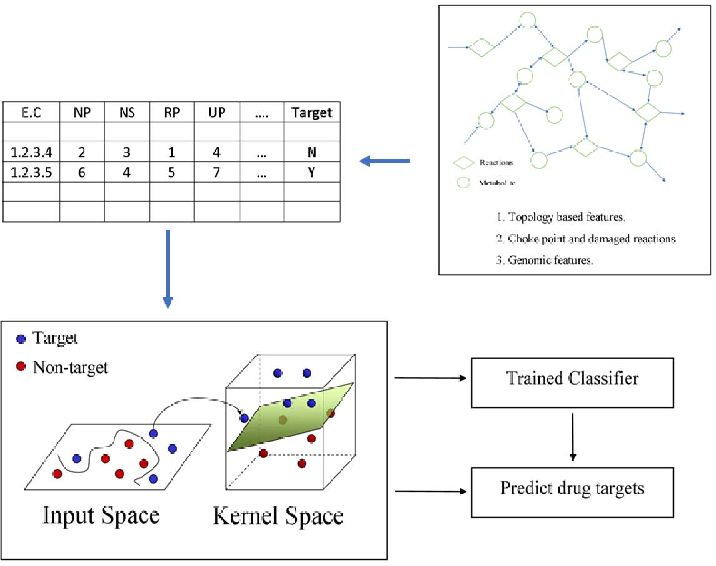
Abstract
Malaria is one of the world's serious diseases causing death of about half a million people in 2015. The protozoan Plasmodium Falciparum inflicts the most damage and is responsible for most malaria related deaths. Biomedical research could enable treating the disease by effectively and specifically targeting essential enzymes of this parasite. However, the parasite has developed resistance to existing drugs, thus making it essential to discover new drugs. We have established a simple computational tool which analyses the topology of the metabolic network of Plasmodium Falciparum to identify essential enzymes as possible drug targets. We investigated the importance of an enzyme in the metabolic network by deleting (knocking-out) a reaction in simulation and examining its effect on the remaining network. Our algorithm then checked whether neighboring compounds of the investigated reaction could be produced by alternative biochemical pathways by using breadth first searches on the whole network. We proposed the use of evolutionary distances as a feature for our machine learning approach to identify potential drug targets. With the help of the machine learning method with the extracted features, we validated previously confirmed and published drug targets in metabolic network of Plasmodium Falciparum. We further identified two new potential targets: dihydrolipoyl dehydrogenase and aconitate hydratase using our approach.
Our Team
- Sourav Dutta, Research Assistant
I am Pursuing my Phd. in the field of Robotics. I have worked on several projects and I am currently working on Motion Planning under uncertainty with non-physical obstacles. - Aakriti Upadhayay
I am Pursuing my PhD. from SUNY Albany. I have worked on several projects and I am currently working on Topological Planning Spaces Algorithms. - Tran Tuan
I am Pursuing my PhD. from SUNY Albany. My previous project was Metabolic Pathway and Graph Identification of New Potential Drug Targets for Plasmodium Falciparum and I am currently working on Gene Expression Time Series and Gene Network Prediction. - Dan Hug
- Anand Kumar Yadav
- Bhargavi SanjayKumar Patel
- Kingsley Rodrigues
- Manogna Madineni
- Rayan Mascarenhas
- Riddhi Sangani
- Sahil Bhasin
- Shiekh Zeeshan
- Sumedh Nandedkar
- Vignesh Manishankar
- Zeyang Wu
Completed MSc and BSc Students
TEACHING
Courses Taught
- ICSI 409 Theory of Computation Fall 2019
- ICSI 503 Algorithms and Data Structures 2016 - Date
- ICSI 521 Discrete Mathematics and Applications 2016 - Date
- ICIS 519 Computational Geometry - Fall 2020
SERVICE
High School Initiatives -- Pictures















RECENT NEWS
Grants
- June 2019 CRII NSF Grant :- Topology Aware Configuration Space
- June 2019 NSF Grant given to sponser the RSS Women in Robotics Workshop in Germany
- July 2019 Germination Seed Grant to Research in Cybersecurity intedisciplinary research project
Recent Publications
- July 2019 IROS paper accepted
- Nov 2019 IEEE/BIBM paper accepted
- Jan 2020 ICRA paper accepted
- Jan 2020 IEEE Semantics paper accepted