
Research Scope
The CVML lab's major research thrusts are focused on the mathematical foundations and algorithmic development of machine learning algorithms with a targeted application to the analysis of visual imagery (images and videos).
Recent Research Projects
-
Skeleton-basaed Human Action Recognition
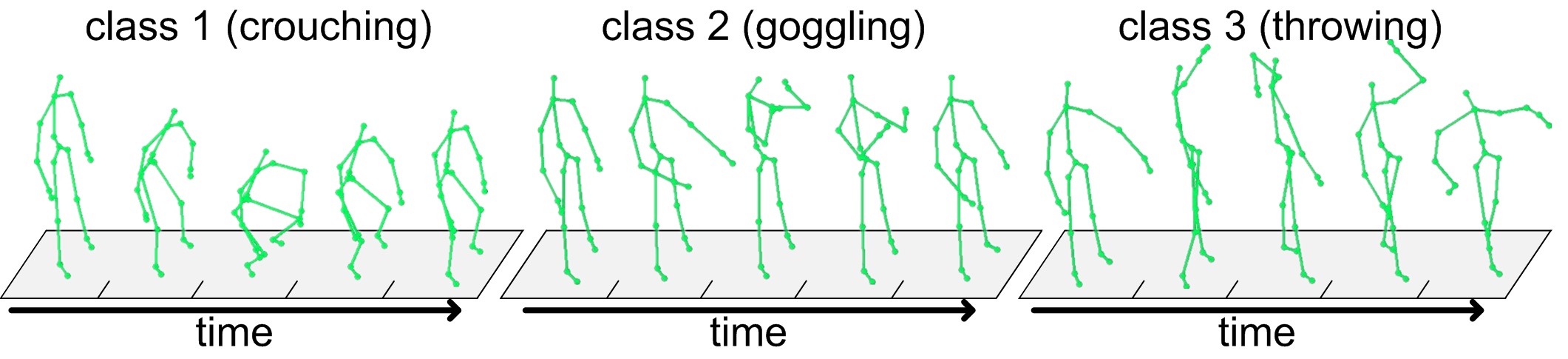 Human action recognition is an important but challenging problem. With advances in low-cost sensors and real-time joint coordinate estimation algorithms, reliable 3D skeleton-based action recognition is now feasible. We are interested in using recursive neural network (RNN) models to solve skeleton based human activity recognition problem. References [LiICCV17][LIICCV15]
Human action recognition is an important but challenging problem. With advances in low-cost sensors and real-time joint coordinate estimation algorithms, reliable 3D skeleton-based action recognition is now feasible. We are interested in using recursive neural network (RNN) models to solve skeleton based human activity recognition problem. References [LiICCV17][LIICCV15] -
Single and Multiple object Tracking
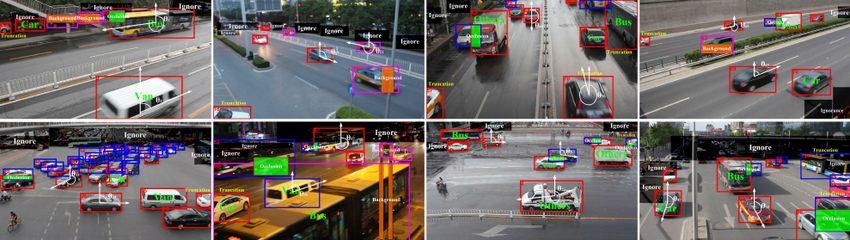
Object tracking, which aims to ex-tract trajectories of single or multiple moving objects in a video se-quence, is a crucial step in understanding and analyzingvideo sequences. A robust and reliable tracking system isthe basis for a wide range of practical applications rangingfrom video surveillance and autonomous driving to sportsvideo analysis. We have developed several object tracking algorithms based on the hypergraph formalism and provided a benchmark dataset for multi-object tracking performance evaluation. References [DuTCyber17][LiICIP17][WenIJCV16] [DuTIP16] [WenTPAMI16] -
Efficient Algorithm for Stochastic Online Pairwise Learning
Area under ROC (AUC) is a metric which is widely used for measuring the classification performance for imbalanced data. It is of theoretical and practical interest to develop online learning algorithms that maximizes AUC for large-scale data. A specific challenge in developing online AUC maximization algorithm is that the learning objective function is usually defined over a pair of training examples of opposite classes. We propose a new stochastic online algorithm for AUC maximization. In particular, we show that AUC optimization can be equivalently formulated as a convex-concave saddle point problem. From this saddle representation, a stochastic online algorithm (SOLAM) is proposed which has time and space complexity of one datum. References [YingNIPS16]